
電動垂直離着陸ドローン
電動垂直離着陸ドローン
eVTOL
ISR eVTOL A-2A
- 重量: 17kg
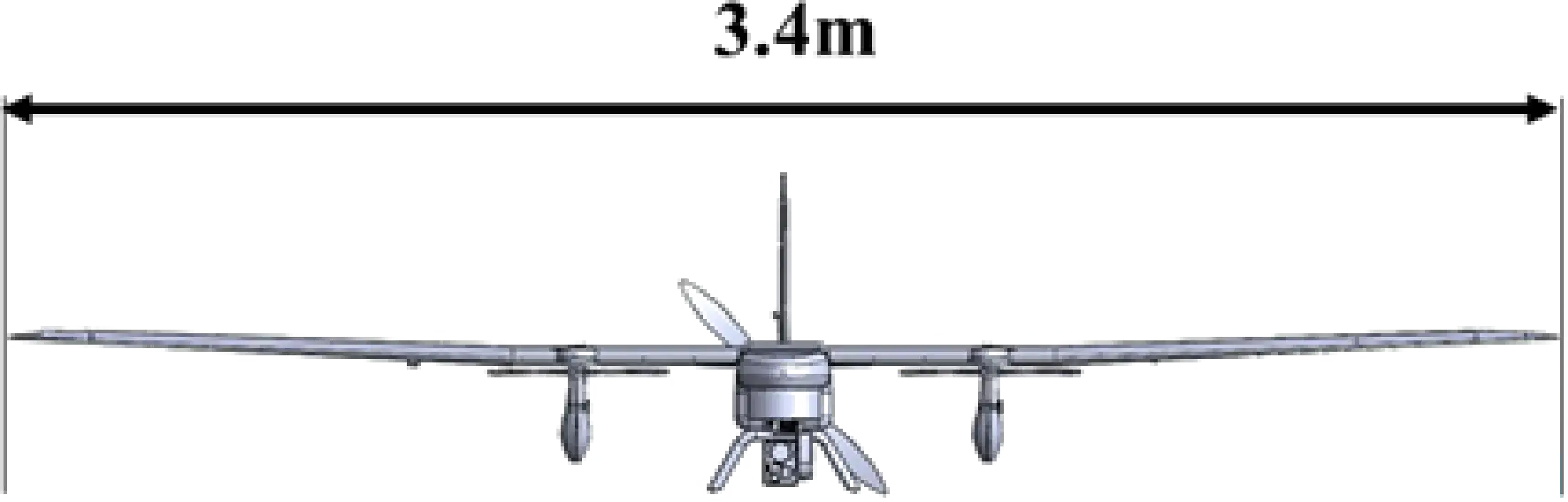
- 幅: 3.4m
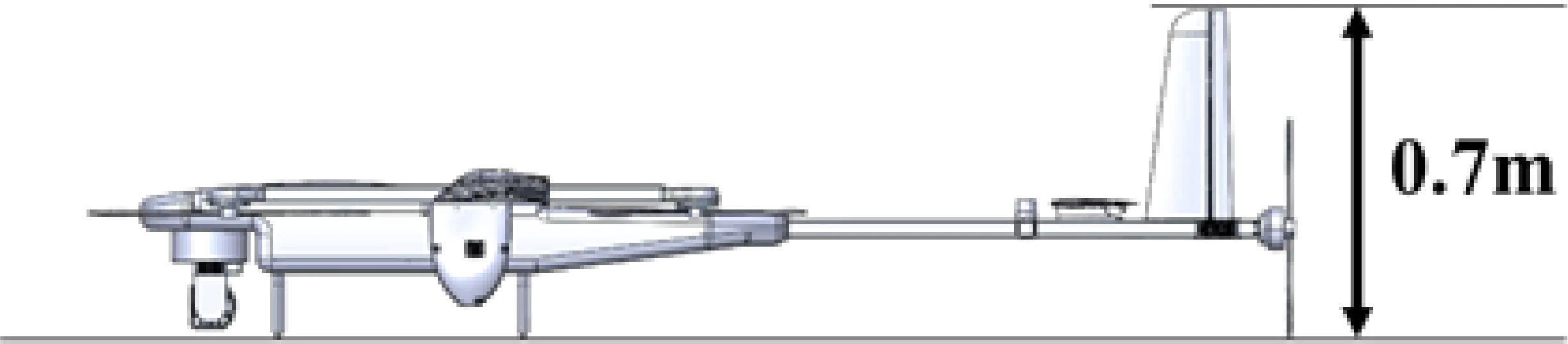
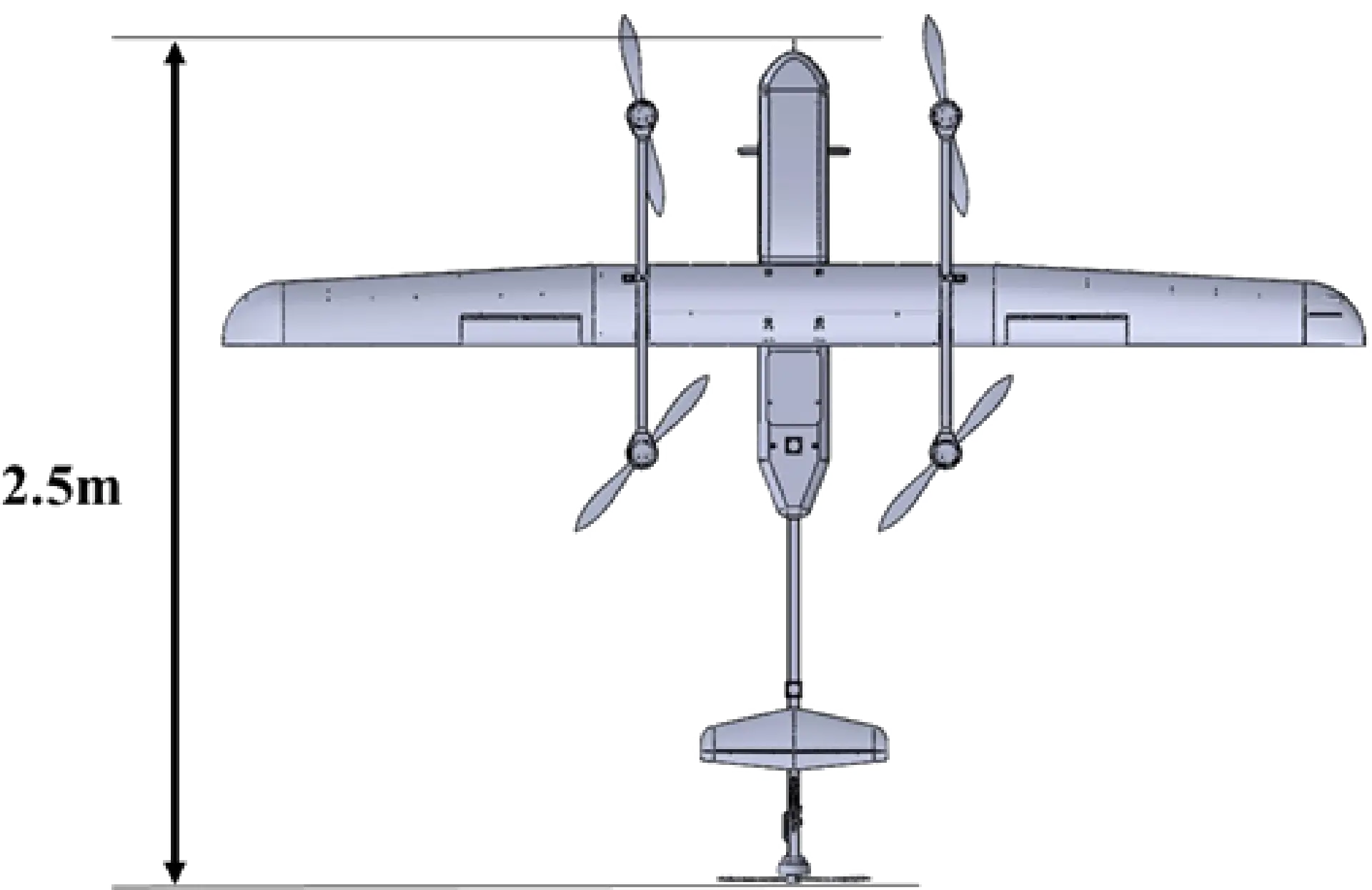
- 長さ: 2.5m
- 航続距離(無風時): 110km
- 航続時間: 1.4hrs
- 最高高度: 4000m
- 最適巡航速度: 23 m/s
- 最高速度: 27 m/s
- 風速耐性: 11 m/s
- 通信距離: 40km
- 映像配信: 30fps (h.264 / h.265)
- レイテンシ < 120ms
- 重量: 17kg
- 幅: 3.4m
- 長さ: 2.5m
- 航続距離(無風時): 110km
- 航続時間: 1.4hrs
- 最高高度: 4000m
- 最適巡航速度: 23 m/s
- 最高速度: 27 m/s
- 風速耐性: 11 m/s
- 通信距離: 40km
- 映像配信: 30fps (h.264 / h.265) レイテンシ < 120ms
性能
- 自動垂直離着陸
- 障害物回避システム
- AIターゲット認識/追跡
- 高精度のターゲット座標
- 鮮明な映像(NIIRS 6)
- デュアルバンド(2.4 / 5GHz 切り替え可能)
- 持ち運び可能な3セットケース
特性
- 自動垂直離着陸
- IP54 (機体) / IP65 (航空電子機器)
- -10℃~50 ℃の環境で運転可能
- IEC 62133規格に適合する12S2Pリチウムイオン電池パック
認証

IP65
MIL-STD-810H
IEC62133 & 200バッテリー充放電サイクルテスト
CPU: Intel i5-1145GRE
Memory / SSD: 2 x DDR4-3200 16GB / 2TB
OS : Win10 IoT Ent 2019 LTSC
スクリーン: 15.6インチ / 2000ニト / 自動輝度調整(※最大21.5インチまでアップグレード可能)
バッテリー: バッテリー:2 x 12S2P / 7時間持続 (ホットスワップ対応)
ジョイスティック3軸 2セット、各2ボタン
9つのトグルスイッチ:
2ポジション x 5
3ポジション x 2
2ポジションセルフリセット x1
2ポジションロック x1
イーサネットポート×1
キーボード

イーサネットおよび Wi-Fi インターフェース
ホットスワップ対応バッテリー
EO/IR Payload
(Optional #1) EO/IR Payload
2 axis, 2 frame dynamic performance
Azimuth | 360° continuous |
Elevation | -90° to 90° |
Roll | Software correction |
Stabilization accuracy | < 0.2 mrad |
Max. angular velocity | >60 degree/s |
Max. angular acceleration | >60 degree/s2 |
Physical
Weight | 1.5 kg |
Operating temerature | <-20 to +55℃ |
IP level | IP66 |
Mounting type | Belly mounting |
Interfaces
Control | Serial-Ethernet |
Video Input | Ethernet -h.264 / h.265 |
Electrical
Input voltage | 24-28 VDC |
Power consumption | < 25w |
(Optional #1) EO/IR Payload (Cont.)
EO camera
Detector | Color CMOS 1/2.8" |
Resolution | 1920 x 1080 |
Focal length | 4.3 - 129mm |
FOV | 63.7° -2.3° |
Zoom | 30x |
IR Camera
Camera type | Uncooled LWIR |
Sensor material | Vox FPA |
Resolution | 640 x 512 |
Pixel pitch | 17 um |
Wave length | 8 -14um |
Focal length | 13 -40mm( 3x optical ) |
FOV | 47.96° x 38.37° -15.59° x 12.47° |
Laser rangfinder
Measurement range | 5 -3000m |
Laser type | Class 1 eye safe |
wave length | 905 nm |
Accuracy | ±2m |
Beam divergence | 3 mrad |
IR sensor DRI performance
Target | Detection (m) | Detection (m) | Indentification (m) |
Human | 1490 | 370 | 190 |
Car | 3610 | 900 | 450 |
Aircraft | 16470 | 4120 | 2060 |
(Optional #2) EO/IR Payload
2 axis, 2 frame dynamic performance
Azimuth | 360° continuous |
Elevation | -110° to 10° |
Roll | Software correction |
Stabilization accuracy | < 0.05 mrad |
Max. angular velocity | >60 degree/s |
Max. angular acceleration | >60 degree/s2 |
Physical
Weight | 3.7 kg |
Operating temerature | -35 to +55℃ |
IP level | IP66 |
Mounting type | Belly mounting |
Interfaces
Control | Serial-Ethernet |
Video Input | Ethernet -h.264 / h.265 |
Electrical
Input voltage | 24-28 VDC |
Power consumption | < 40w |
(Optional #2) EO/IR Payload (Cont.)
EO camera
Detector | Color CMOS 1/2.8" |
Resolution | 1920 x 1080 |
Focal length | 6.5 - 215mm |
FOV | 56.3° x1.9° |
Zoom | 45x |
IR Camera
Camera type | Uncooled LWIR |
Sensor material | Vox FPA |
Resolution | 640 x 512 |
Pixel pitch | 12 um |
Wave length | 8 -14um |
Focal length | 30 -120mm( 4x optical ) |
Laser point
Laser type | Class III B |
wave length | 830 nm |
Laser power | > 50mW |
(Optional) Laser designator
Wave Length | 1064 nm |
Average laser power | > 40 mJ |
Laser coding | NATO STANAG 3733 |
Laser axis accuracy | < 0.05 mrad |
Beam divergence | ≦0.4 mrad |